



近年來,高光譜遙感技術已經越來越多的用到農業、林業、地質、海洋、氣象、水文、軍事、環保等領域,形成了一個從地面到空中,乃至空間,從信息數據收集、處理到判讀分析和應用,對進行探測和監測的多層次、多視角、多領域的觀測體系,成為獲取地球資源與環境信息的重要手段。
目前常用的航天或航空遙感,雖然其可以實現大面積同步觀測,時效性強,獲取信息受條件限制少,但是其數據獲取成本較高,數據精細程度不足的缺點不可忽視。而近地遙感時間靈活,可以進行小范圍細節探測,提供精細的分析數據,但同時它的缺點同樣存在,如大面積數據的獲取速度較慢,有一些地區自然條件惡劣不適合人為采集,所以目前近地遙感仍局限于基礎研究和數學建模當中,在一些實際應用中仍然受到限制。
針對這一情況,萊森光學(Lisen Optics)公司實現了無人機搭載高光譜地物光譜儀測試系統。該系統在實現了較大面積檢測,受限條件小的同時,可以快速,精細的獲取數據,很好的結合了航空遙感和近地遙感的優點,避免了兩者的缺點。
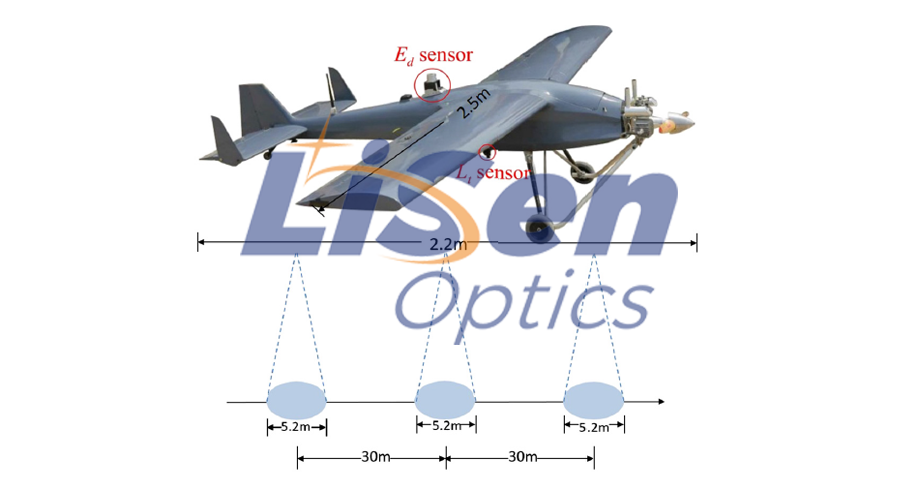
該系統無人機需人為操控,雙通道或三通到高光譜采集系統由微型處理器控制自動記錄GPS信息,采集天空和地面的光譜數據,如天空總輻照度,水體的離水輻亮度,地物的反射光譜等參數。
典型應用
1.海洋、湖泊水色遙感研究
2.衛星數據地面驗證
3.水體剖面測量
4.水質分析(葉綠素、懸浮物、CDOM)
5.海岸帶研究
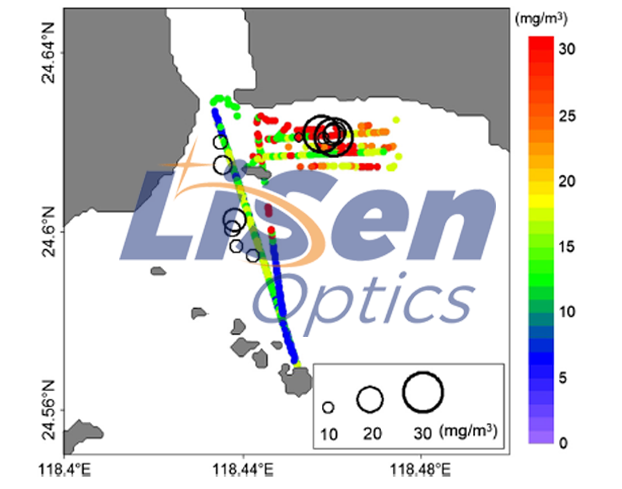
典型案例-海洋赤潮危害遙感監測
通過無人機機載雙通道或三通道高光譜遙感光譜儀,用于自動化采集水體反射光譜信息,進一步得到水體遙感探測需要獲取的光譜信息:離水輻亮度Lw、歸一化離水輻亮度LwN,遙感反射率Rrs。


無人機機載高光譜介紹
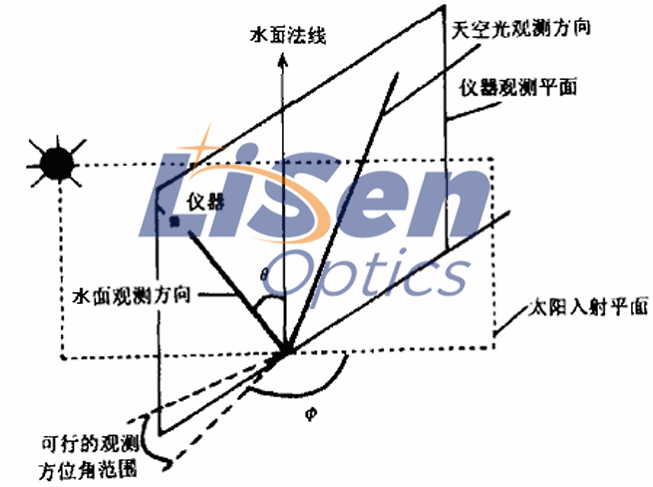
1.獲取光譜數據的方法
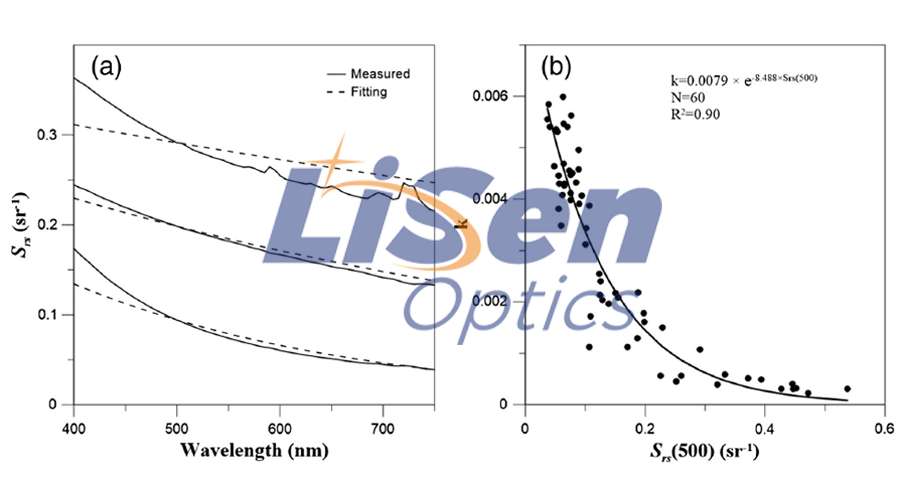
水體遙感探測需要獲取的光譜信息:離水輻亮度Lw、歸一化離水輻亮度LwN,遙感反射率Rrs和剛好處于水面以下0-的輻照度比R。可按照如下的計算公式得到,
Lw = Lsw - rLsky
LwN = LwF0/ Ed (0+)
Rrs = Lw/ Ed (0+) = LwN/ F0
R (0-) = Eu (0-) / Ed (0-)
其中需要測量的參數有
1)水面輻亮度Lsw:通過向下一通道光譜儀測量“水面輻亮度”
2)天空散射光輻亮度Lsky:通過向上一通道光譜儀測量“天空散射光輻亮度”
3)水面入射總輻照度Ed(0+):現場測量(此方法需要三通道):L_WN=L_W×F_0/E_d (0^+)其中F0為平均的大氣層外輻照度。通過向上一個通道光譜儀測量“入射總輻照度”。遙感反演(此方法適用于雙通道測量):L_WN=(r⁄R)^2 L_W/[t(λ,θ_0 )(1-ρ(θ_0))cos?(θ_0)]其中t(λ,θ_0 )為大氣透過率;ρ(θ_0 )為氣水界面Fresnel反射率;R為地球到太陽之間的平均距離;r為測量是太陽到地球的距離。
無人機機載雙通道高光譜遙感光譜儀開發項目主要分為兩大部分:無人機和雙通道或三通道高光譜光譜儀。
2.無人機部分(固定翼)
其主要技術參數如下:
1)飛行速度 :110km/h=30.5m/s
2)續航時間:大于3小時
3)平穩度:左右搖擺可以控制在3度范圍內,前后俯仰可以控制在5度范圍內
4)飛行高度:400-1100m
5)艙內溫度:和外界溫度相同
6)艙內空間:20cm×14cm,高度不限
7)載重:1.5kg~2kg
同時,無人機艙頂和艙腹可以按要求(尺寸和位置)設計觀察孔。另外不需考慮防水罩問題。
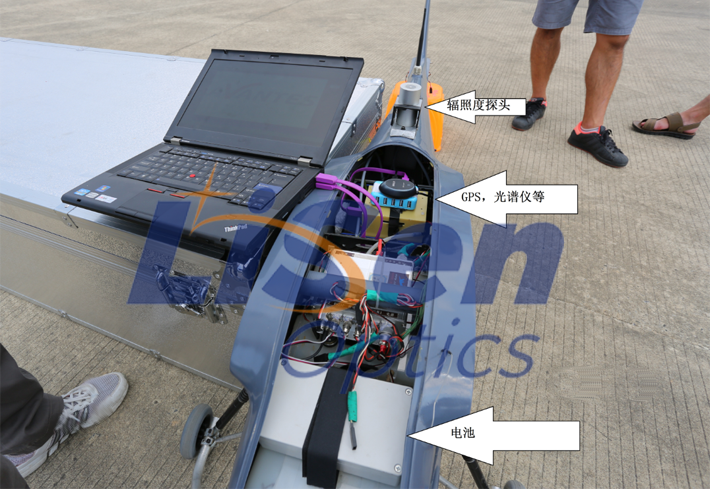
3.高光譜光譜儀部分
高光譜光譜儀部分由光學平臺、光纖探頭、控制模塊、供電模塊、數據存儲模塊等部分組成,本項目對光譜儀的要求如下:
1)采用雙通道或三通道高光譜光譜儀,采集參數為水面輻亮度和天空總輻照度、天空散射光輻亮度等。
2)光譜儀能夠實現自動采集。
3)探頭視場角度可更換調整。
4)固定在無人機探頭固定件設計需要可調。
5)探頭測量角度可調。
6)可保存GPS信息。
7)光譜儀應含有供電系統,續航時間應大于3小時。
8)整套光譜儀系統重量不應超過4-5kg。
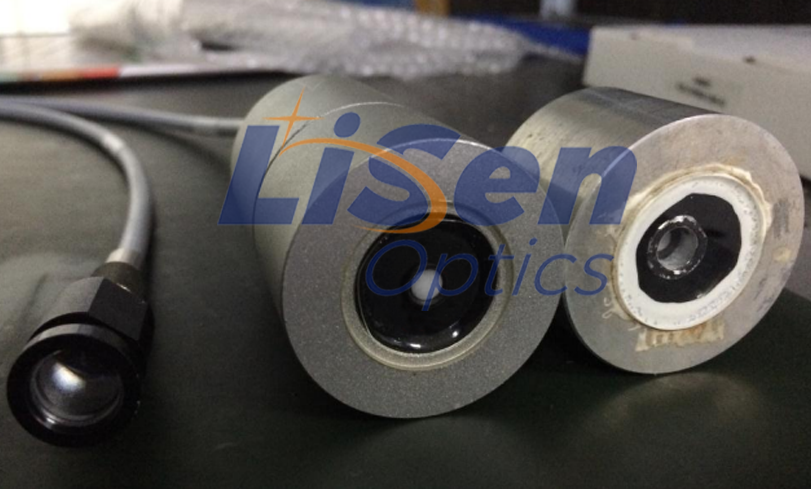
輻亮度和輻照度探頭
飛行區域
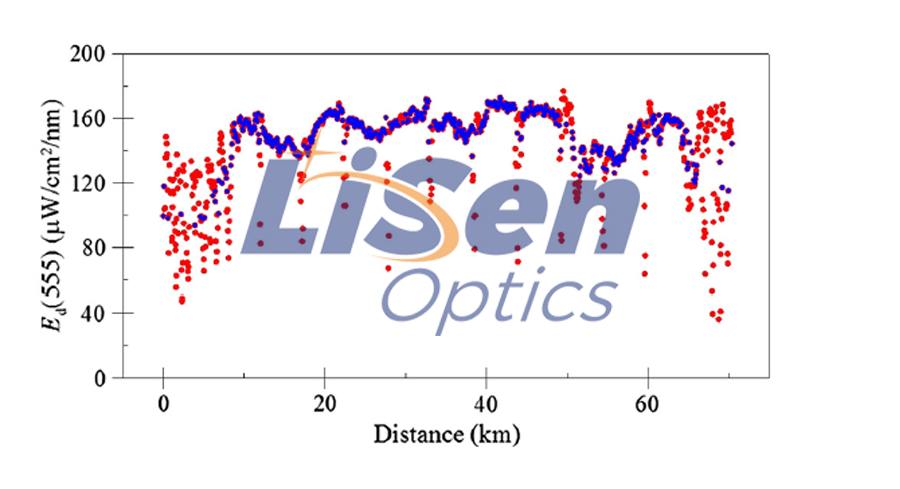
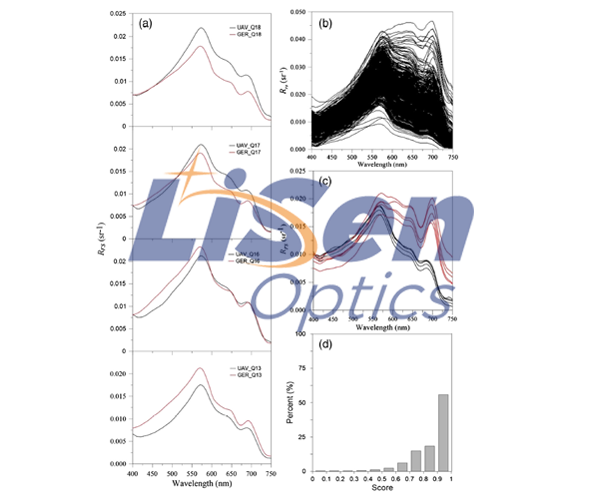
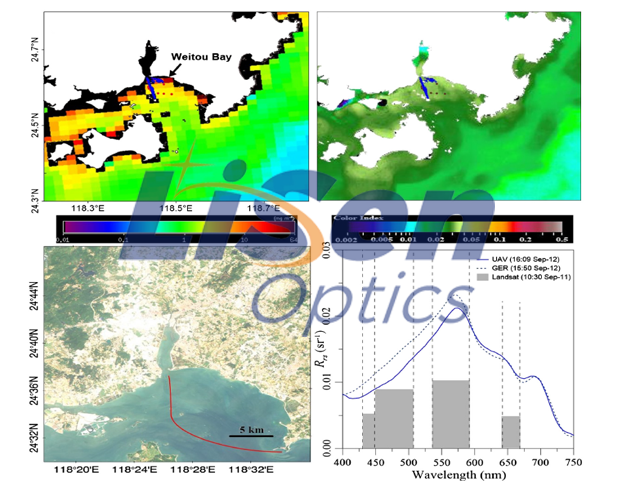
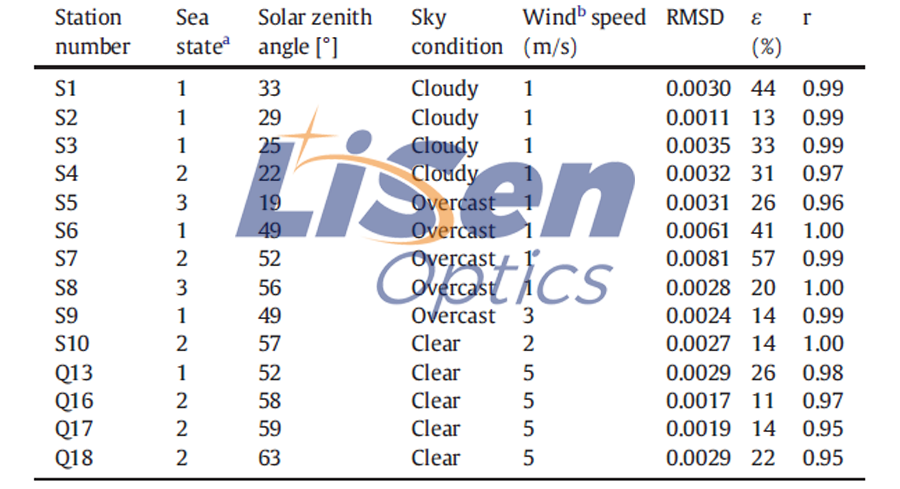
備注:圖例為UAV為我司定制無人機載高光譜測試數據和GER地面高光譜數據對比
主要技術指標
型號 | iSpecHyper-W300 | |
無人機(固定翼) | 飛行高度 | 300m |
飛行速度 | 110km/h | |
高光譜光譜儀 | 探測器 | 2048像素面陣CCD探測器 |
光譜范圍 | 300-1100nm | |
GPS | YES | |
分辨率 | 1.4nm | |
供電充電電池組 | 工作時間4h | |
水面輻亮度 | YES | |
天空散射光輻亮度 | YES | |
水面入射總輻照度 | YES | |
數據自動化采集 | YES | |
探頭測量角度可調 | YES | |
探頭視場角度可調 | YES | |




